
用Unity+机器学习做类似Adobe黑科技的黑科技
引子那一天看到了Adobe的黑科技。弹幕里一片震惊,纷纷感慨卧槽。我就淡定多了,这一看不就是机器学习生成法线图和深度图,然后向量模拟光照计算嘛。不过如此(酸了酸了)。PS:机器学习+shader是我猜测的,实际工程肯定是需要更多细节,包括去除背景,去除原始光照。而且研究项目和实际工程项目差距很大,实际工程需要更多的优化和稳定性。除了大的算法,还需要很多策略性的细节。换句话说,从demo到产品,工程
·
引子
那一天看到了Adobe的黑科技。
弹幕里一片震惊,纷纷感慨卧槽。我就淡定多了,这一看不就是 机器学习生成法线图和深度图,然后向量模拟光照计算嘛 。不过如此(酸了酸了)。
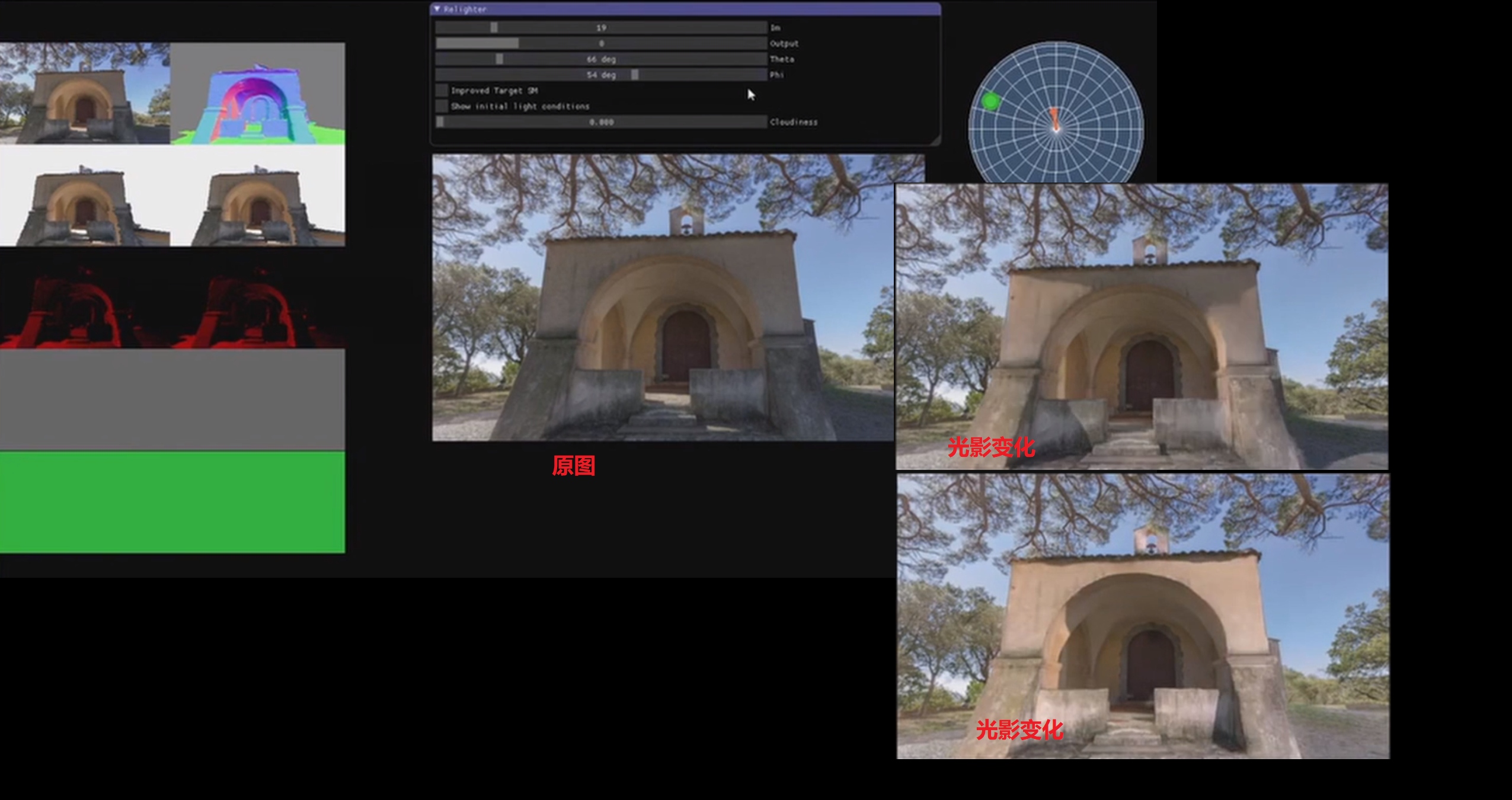


PS:机器学习+shader是我猜测的,实际工程肯定是需要更多细节,包括去除背景,去除原始光照。而且研究项目和实际工程项目差距很大,实际工程需要更多的优化和稳定性。除了大的算法,还需要很多策略性的细节。换句话说,从demo到产品,工程师和研究者要迈过更多的坑,牺牲更多的头发。这里 对黑科技的工作者表示深深的敬意 。
想法
啊,我也想搞黑科技。
看着眼前的1060,流下了没钱的泪水。 但身为一个Geek,没钱也不能阻止我折腾的手。 但光有手也是不行的啊,机器学习,训练集才是爸爸。 有训练集是Alpha Go,没训练集是阿尔法狗。(从0训练的那是Alpha zero)

但身为一个Geek,没训练集也不能阻止我折腾的心。 一个想法在我脑海凌空出世。 用unity来造爸爸啊。 嗯,用unity来生成训练集。
实现
我立刻打开了AssetStore(unity的菜市场) 搜索city。
划掉划掉。 搜索city+Free。 很好,这个就是我们需要的了。

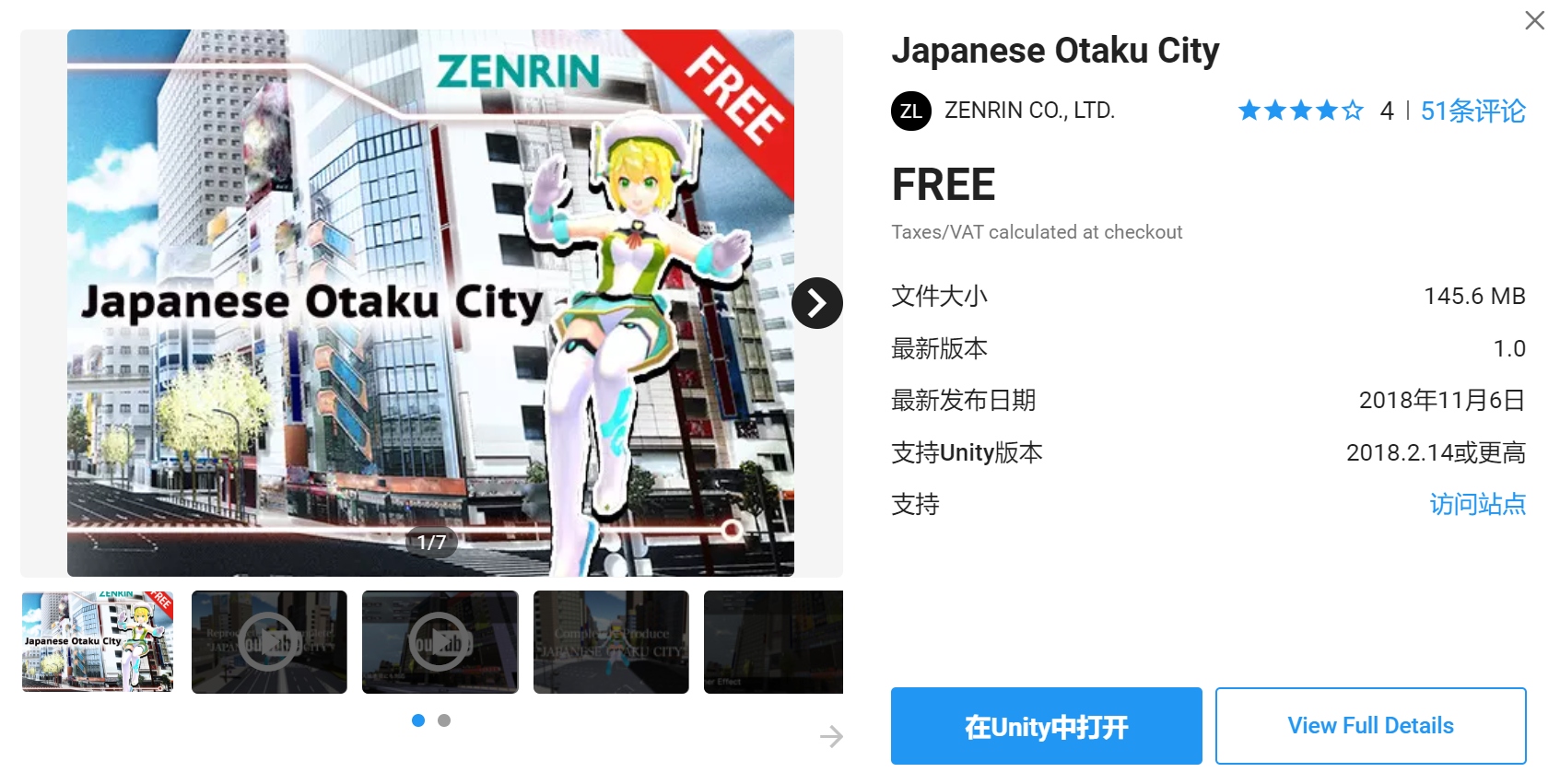
然后进入unity,导入并打开下载下来的城市示例场景。
接下来就是截屏了, 最好的方式是用针对camera的全局shader去获取视野范围中的法线和深度图 ,但我在做这个的时候对shader不是很熟, 就用了Physics.Raycast去判断深度 。 简单来说,就是人眼发射一束激光,激光在照射到障碍物时停下,这激光的距离就是眼睛与障碍物的距离,也就是我要的深度。多束激光就代表了多个像素。 获取深度的函数就是上文提到的Physics.Raycast。

public
Texture2D
GetDepth
(
)
{
Texture2D
depth
=
new
Texture2D
(
m_targetWidth
,
m_targetHeight
,
TextureFormat
.
RGB24
,
false
)
;
RaycastHit
hit
;
//float maxDistance = 500f;
float
maxDistance
=
m_mainCamera
.
farClipPlane
;
Debug
.
Log
(
maxDistance
)
;
for
(
int
x
=
0
;
x
<
m_targetWidth
;
++
x
)
for
(
int
y
=
0
;
y
<
m_targetHeight
;
++
y
)
{
float
_x
=
(
x
+
0f
)
/
m_targetWidth
*
Screen
.
width
;
float
_y
=
(
y
+
0f
)
/
m_targetHeight
*
Screen
.
height
;
Ray
look
=
m_mainCamera
.
ScreenPointToRay
(
new
Vector3
(
_x
,
_y
,
0
)
)
;
Color
color
=
Color
.
white
;
if
(
Physics
.
Raycast
(
look
,
out
hit
,
maxDistance
)
)
{
color
=
Color
.
white
*
hit
.
distance
/
maxDistance
;
}
depth
.
SetPixel
(
x
,
y
,
color
)
;
}
return
depth
;
}
另外,Physics.Raycast要求目标对象有Collider组件。为了方便,用了一个函数递归去添加组件。在新的unity里,你也可以用ctrl+右箭头展开对象树,再统一添加组件。
void
func
(
GameObject
obj
)
{
if
(
obj
.
GetComponent
<
MeshCollider
>
(
)
==
null
)
obj
.
AddComponent
<
MeshCollider
>
(
)
;
foreach
(
Transform
child
in
obj
.
transform
)
{
func
(
child
.
gameObject
)
;
}
}
然后就是在Unity中循环的采集图片啦。 我是直接手动在城市里转圈,你也可以写个自动转圈的代码。 像这样的样本,大约弄了500个。 500个是因为我机器学习选的[pix2pix](https://github.com/affinelayer/pix2pix-tensorflow )。它一个示例的训练集 CMP Facades dataset 就是采用大约500个样本。 然后就无脑丢进去,修改下参数,直接跑python程序。训练了大约一上午。
结果
早上打开电脑让它跑着,中午回来看结果。 先看看,它直接在unity场景中的效果,也就是在测试集上的表现。 嗯,目测还行。 然后是用了几张网上的城市风景图。 嗯,些微有些微妙。 粗略来看的话, 第一个问题是车没有被检测到。 不过这也在意料之中。 因为我都没有车的模型。 可恶,莫欺少年穷,等来日发达了,必要在AssetStore上买上最贵最大的车。 第二个问题是树没有检测到。 这个就更在意料之中了。 因为我的树,是二次元的。 可恶,莫欺少年穷,等来日发达了,必要在AssetStore上买上最贵最大的树。
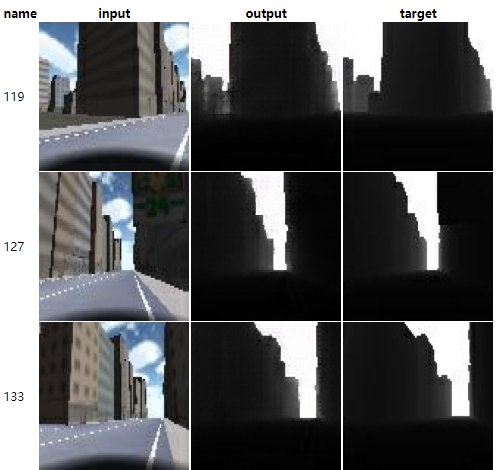


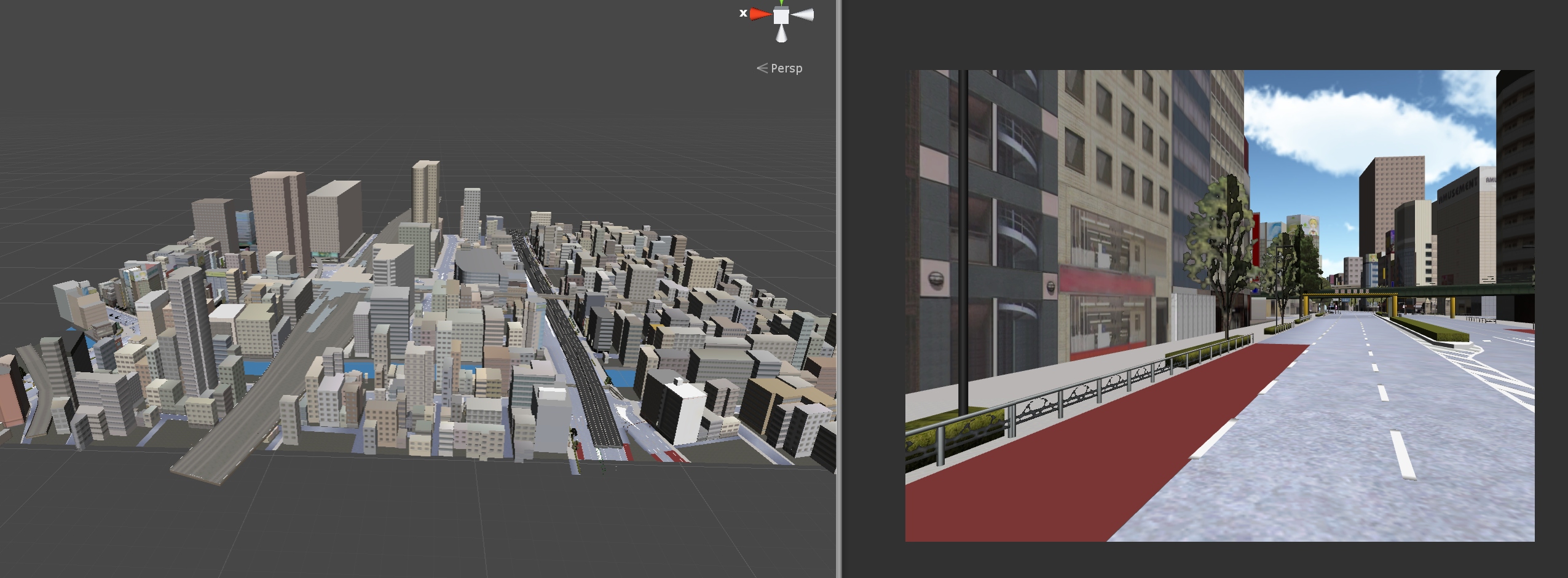
最后,用了个我自己在路上录制的视频。下面就是训练后的模型对实际照片的效果,左图是原视频,右图是深度图。方框里的红字表示深度,其实就是右图的灰度值啦。随着我人前进,数值有微妙的变化,能做到这点我感觉还挺不错的了。

尾
在我印象里,Unity很早就开始推机器学习的东西了。当时办了用ml-agent的游戏比赛,现在ml-agent都能产品化了,今天还在公众号上看到了[《训练适应性极强的机器学习模型?合成数据:模拟现实的无限可能》](https://unity.cn/projects/xun-lian-gua-ying-xing-ji-qiang-de-ji-qi-xue-xi-mo-xing-he-cheng-shu-ju-mo-ni-xian-shi-de-wu-xian-ke-neng )这篇文章。属实给力。
unity+机器学习肯定是可以产生很不错的效果的。 但是当你想要把一些酷炫的东西用在游戏上,就不那么简单了。 性能问题(很多论文里的酷炫东西都是无优化硬上的),泛化问题(论文上看着很酷炫,自己跑来各种诡异),训练耗时问题(1060馋哭了)。怀着过高期待去做,可能会碰壁。 但整体来说,我觉得是值得期待的。因为在游戏的性质上,从带来一个新体验的角度的方面来说,一些奇怪的表现也许会带来更有意思的体验。换句话说,在游戏中的机器学习相比与现实世界的机器学习,人们的接受度应该会更高一点。但把新技术转换成游戏的乐趣,中间肯定需要很多想象与设计的。
在游戏中使用机器学习是个挺需要想象力的工作。 但就是这一点,才让人觉得最有趣不是吗?
参考
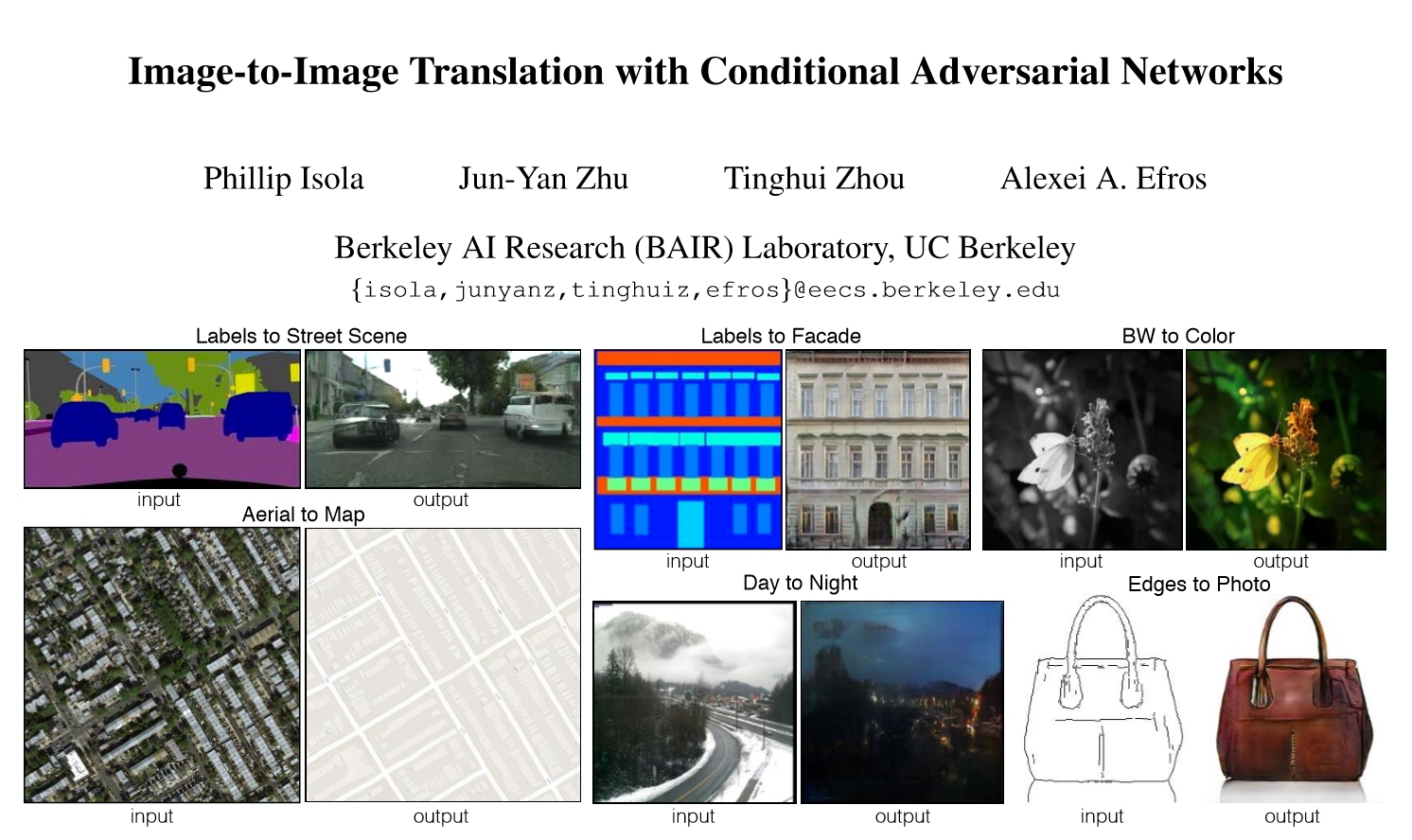
[Adobe黑科技视频](https://www.bilibili.com/video/BV1Vk4y1k7Lj?t=333 ) [Adobe黑科技](https://zhuanlan.zhihu.com/p/90895846 ) [Image-to-ImageTranslationwithConditionalAdversarialNetworks](https://arxiv.org/abs/1611.07004 ) [github pix2pix-tensorflow](https://github.com/affinelayer/pix2pix-tensorflow )

分享前沿Unity技术干货和开发经验,精彩的Unity活动和社区相关信息
更多推荐


 0
0 0
0- 0



 已为社区贡献714条内容
已为社区贡献714条内容

所有评论(0)